Hobby level development board. Learn more »
Prototyping/Research Platform. Learn more »
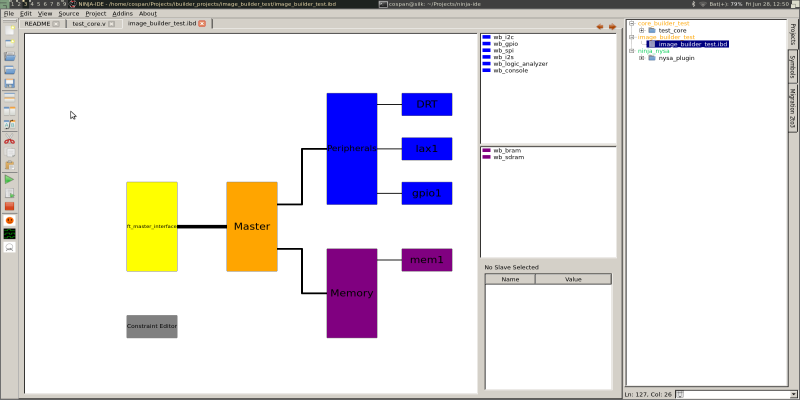
Nysa Development Environment. Learn more »
Nysa is a software toolset that assists:
View details »
A hobby board specifically designed to work with Nysa.
An engineering/research prototype platform designed to work with Nysa